Trinmotorer indeholder to forskellige sæt spoler. Strømmen i disse spoler styres af din trinvise motordriver.
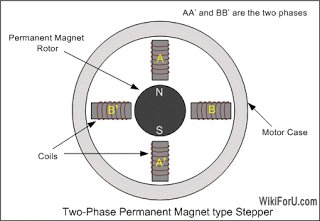
For at bevæge motoren i begge retninger køres spolerne den ene efter den anden og i forskellige retninger. Forestil dig at dette er en normal 3-faset vekselstrømsmotor, men i stedet for tre faser bruges kun to.
En "fulde trin" (1/1 "microstepping" ) ville betyde at slukke for den ene spole og den anden - hvilket resulterer i en ryk bevægelse til den næste position. Ægte trinmotorer har flere sæt af disse spoler (snarere end to som i diagrammet) - normalt 200 eller 400, hvilket giver 1,8 ° eller 0,9 ° rotation pr. "Fuldt trin".
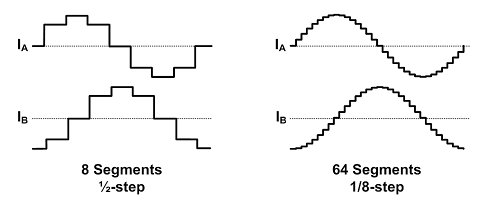
En sådan bevægelse er normalt ikke ønsket, da motorens øjeblikkelige bevægelse skaber støj og vibrationer. Hvis begge spoler drives med mindre strøm (71% af den fulde strøm, er det gensidige af kvadratroden på 2, så den samlede kraft på motoren forbliver den samme ) under skiftet fra den ene strøm til den anden, kan der opnås en anden position - et "halvt trin" mellem to fulde trin.
Dette kan gentages for et højere antal "mikrotrin", hvor 16 er normalt kompromis.
Optimal glathed - og næsten ingen støj - opnås ved at køre trinmotoren med rene sinusbølger. Jo tættere en stepper driver kan komme den rene sinusbølge, jo lavere vil støj fra stepmotoren være:
Nogle trinmotordrivere, især TMC-familien af chips, kan generere 256 mikrotrin internt og tilnærme en sinusbølge ganske godt.
Andre trinmotordrivere (som LV8729) kan også håndtere 128 mikrotrin, men de kræver printerens kontrolkort til at sende et individuelt trin signal til hvert af disse trin - hvilket kan begrænse hastigheden på grund af den ekstra belastning på kortets MCU.